

一眼识破,眼力超群 |大华股份全结构化摄像机
全结构化的摄像机来了,大华股份全结构化摄像机是一台采用超高性能GPU芯片和深度学习算法,支持人脸/人体/机动车/非机动车同时抓拍的摄像机,解决了目前市面上一台AI摄像机对人和车不能同时布控的问题,一台顶多台设备。
全结构化的摄像机来了,大华股份全结构化摄像机是一台采用超高性能GPU芯片和深度学习算法,支持人脸/人体/机动车/非机动车同时抓拍的摄像机,解决了目前市面上一台AI摄像机对人和车不能同时布控的问题,一台顶多台设备。
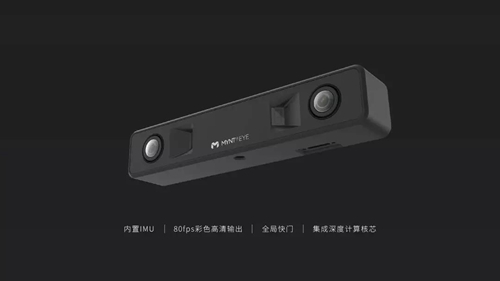
6月27日消息,机器人创新生态获悉小觅智能CEO庞琳勇博士获邀出席了“MWCS世界移动大会·上海 2018服务机器人核心技术与人工智能创新发展论坛”,于论坛现场正式发布了公司旗下双目硬件系列新品——小觅双目摄像头深度版(MYNT EYE Depth)。

小觅双目摄像头深度版(MYNT EYE Depth)延用“双目+IMU”的核心硬件方案组合,首度配置了2颗彩色图像采集摄像头,提供高达1280×720的深度分辨率,识别深度达到10m+,可输出帧率最高达80fps的高清彩色图像。并且无需依赖终端计算,便可直接输出深度图像。

早在人工智能行业兴起之初,就有业界领军人物表示过,“计算机转变的核心技术支持,得益于3D传感器,又称为深度摄像头、深度传感器的采用……”事实上,自从计算机由2D过度到3D世界,人们的计算体验就被彻底颠覆了。
随着3D传感器的发展,视觉导航正在逐步发展成为机器人导航的主流方式。相比以前较为主流的无线定位、激光雷达、惯性导航以及超声波等方式,视觉导航在成本和计算方式上都优势显著,由此也催生了深度摄像头行业的迅速崛起。

由于用激光雷达进行视觉导航,存在价格昂贵,信息缺失等问题,深度摄像头做视觉导航,被普遍认为是行业的发展方向。而双目视觉则是计算机视觉里一直存在的一个主要分支。
双目摄像头是利用仿生学原理,通过标定后的双摄像头得到同步曝光图像,然后计算获取的2维图像像素点的第三维深度信息。双目摄像头利用视觉计算原理,可以计算出拍摄场景内物体的3维空间位置信息,在此基础上可以实现环境感知、体感、建模、行为识别等各种应用。相比单目摄像头,双目摄像头的功能更加丰富,可获取依靠单目摄像头无法准确识别的信息。
近几年,国内一些科技类初创企业开始积极布局深度摄像头市场,MYNTAI小觅智能即是其中之一。
MYNTEYE深度版发布,带来双目硬件进阶方案
作为MYNTAI小觅智能旗下的主要产品线,小觅双目摄像头系列产品一直致力于成为行业领先的双目技术研发与应用平台,上个月刚刚全新升级上线了小觅双目摄像头标准版(MYNT EYE Standard),MYNT EYE Standard标配六轴传感器(IMU)和红外主动光探测器(IR),结合自研的帧同步、自动曝光及白平衡控制等摄像头技术,可输出高精度同步的图像源,帮助降低算法研发难度,加快算法研发效率。
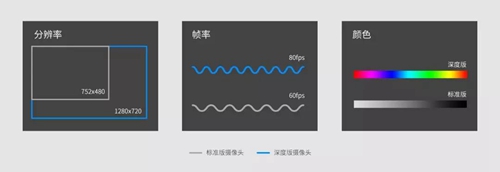
此次发布的小觅双目摄像头深度版(MYNT EYED),首度配置了2颗彩色图像采集摄像头,提供高达1280×720的深度分辨率,识别深度达到10m+,可输出帧率最高达80fps的高清彩色图像。并且无需依赖终端计算,便可直接输出深度图像。
相较标准版双目,深度版可以提供更精准的深度图像精度,可以输出更高清的彩色图像源,为三维空间信息的获取提供更高性能,可说是为视觉领域的技术应用和研究提供了进阶版双目相机方案,也将在三维导航避障、三维测量、三维识别等领域拥有更广泛的应用前景。
“IMU+视觉”核心方案,为视觉SLAM而生
小觅双目摄像头深度版延用 “双目+IMU”的核心硬件方案组合,内置六轴IMU传感器,利用双目和IMU数据的互补性,能为视觉以及空间移动算法的研发提供数据校正。可以帮助降低高精度的视觉SLAM算法和空间运动追踪算法的研发周期。是视觉SLAM研究中精度更高、成本更低、布置简单的视觉SLAM优质硬件方案。双目+IMU亦是视觉里程计(VIO)的科研标配硬件方案。

内“芯”不凡,应用领域更广
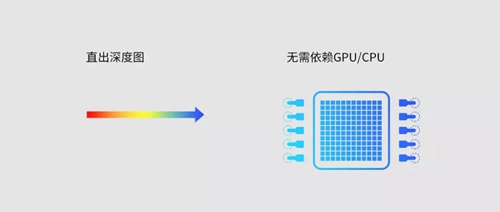
小觅双目摄像头深度版内置一颗强大内“芯”,可在设备端完成双目深度计算,无需依赖终端的GPU/CPU,本身便可直接输出双目深度图像,为视觉领域的技术研发与应用提供了集成性能更佳的硬件方案。

作为一款针对立体视觉计算应用进行深入研发的硬件产品。小觅双目摄像头深度版(MYNT EYE Depth)可广泛应用于视觉定位导航(vSLAM)领域,包括:无人车和机器人的视觉实时定位导航系统、无人机视觉定位系统、无人驾驶避障导航系统、增强现实(AR)、虚拟现实(VR)等;同时,还可应用于视觉识别领域,包括:立体人脸识别、三维物体识别、空间运动追踪、三维手势与体感识别等;亦可应用于测量领域,包括:辅助驾驶系统(ADAS)、双目体积计算、工业视觉筛检等。
专注双目硬件研发,提供行业领先视觉解决方案
深度摄像头是技术门槛非常高的行业,MYNTAI小觅智能早在成立之初就专注于立体视觉领域的研究,并且逐步明确了成为专业的双目视觉硬件供应商的发展方向,针对不同应用领域需求推出不同版本的双目硬件,提供完整的技术支持和定制化方案。精准的布局以及不俗的产品研发实力,使得小觅智能迅速获得了资本市场的认可。
2017年,小觅双目摄像头甫一面世,便获得了国内外诸多知名企业的认可。时至今日,小觅智能已获得超200家Tier 1客户订单,申通、顺丰、新松、莱宝等行业翘楚更是纷纷伸出橄榄枝。
近两年,随着巨头的积极布局以及技术的逐渐成熟,深度摄像头领域还将迎来3至5年的技术爆发期,小觅智能将积极把握现下绝佳的时间窗口,努力将小觅双目摄像头(MYNT EYE)系列产品发展成为行业领先的双目技术研发与应用硬件解决方案。未来,MYNTAI小觅智能还将着重发力机器人视觉导航、无人配送和VR/AR等领域,提供行业领先的视觉(VSLAM)解决方案。
VAR成世界杯主角,扭转西班牙命运,介入将近1/2的点球判罚,“上帝之手”之类的足球冤案或将不复存在。
作为霸道暖心总裁的占南弦,住所中每一个物件自然都要体现其身份和地位。你知道占南弦家里听音乐所使用的设备是MartinLogan EM-ESL静电喇叭配SensaSound的THX功放TPO-5300吗?作为一名靠着自己的独特天赋,白手起家并创办浅宇科技的商业精英,所用的扬声器的品味自然要吻合其人物设定。
6月27日消息,讯众股份旗下全资子公司云讯科技,面向国内市场发布“云讯云雀”智能语音机器人软件。该软件的最大特色是,让企业真正实现低成本高效率获客。
今天,Rokid 举行了成立四年以来第一场正式的发布会 Rokid Jungle,发布了售价 799 的便携 …
华为在荷兰举行的运营商IT全球技术峰会上重磅发布全球首个ICT融合一朵云FusionCloud 6.3解决方案,用“一朵云”和“全栈云服务”助力运营商构建数字未来。
当前虚拟化程度居高不下,大部分运营商并没有享受到云化带来的种种好处。唯有彻底向IT资源云服务化转型,并构建以“一朵云”为目标的使能资源融合、应用融合、数据融合的ICT基础设施平台,云的价值才能充分发挥。
华为基于FusionCloud 6.3的新一代运营商私有云,作为全球首个ICT融合一朵云架构,率先通过一云多池实现运营商内部IT应用、外部创新业务应用、电信网络应用运行在统一云平台,从而统一管理所有资源池;同时通过提供业界最多的IaaS+PaaS+DaaS全栈云服务,最高可提供多达40+服务类型,帮助运营商关键核心业务和重载业务轻松上云。创新应用云上开发、测试和生产环境所需的消息、缓存、数据库等中间件服务实现小时级部署,微服务组件和容器化能力让应用实现分钟级发放、秒级弹缩。
此外,华为FusionCloud 6.3能够帮助运营商整合IT和CT的多种数据源,提供OLAP(联机分析处理)需要的离线分析、流处理分析、实时检索、融合数仓等能力和OLTP(联机事务处理)需要的Oracle、MySql、SqlServer等多种数据访问能力,以As-A-Service的使用方式提供给客户,供不同的业务分析需求灵活调用。全新的PaaS服务和新增云服务目录功能,让运营商ISV应用的服务化快速接入,为运营商业务部门提供业务创新的生态环境。
作为全球唯一提供多类型灾备服务的解决方案,FusionCloud 6.3还可为不同业务部门提供本地、同城、跨地域容灾、云主机高可用、跨云备份等灾备服务,保障业务永续。凭借业界唯一的公有云私有云统一架构,实现用户线上线下一致体验,支持运营商向混合云架构平滑演进。
华为发布全球首个ICT融合一朵云FusionCloud 6.3
华为运营商数据中心Marketing与解决方案销售部部长蒋雪表示:
“华为ICT融合一朵云FusionCloud 6.3解决方案的目标是提供覆盖IaaS、PaaS、DaaS的全栈云服务,以及业界最丰富的云服务种类,帮助用户建设自己的‘内部公有云’。通过开放的分布式与混合云架构,以统一云平台支持电信网络业务,IT支撑系统,创新类业务以及2B业务场景云化转型,帮助客户缩短TTM,提升用户体验,降低生命周期TCO。”
作为全球领先的ICT解决方案提供者,华为将持续通过创新的IT产品与解决方案帮助运营商构建开放解耦的云架构,帮助运营商整合内外部资源,为应用提供稳定性和敏捷性的IT云服务,助力运营商从容应对数字化转型。
在6月27-29日即将举行的世界移动大会上海站(2018MWCS)期间,华为将会首次面向运营商展示基于FusionCloud的ICT融合云解决方案。
AR头显公司Leapsy近日正式发布热成像AR头显,将AR与红外热像技术集成,目标电力行业,解决传统热像仪设备占用双手不方便操作的痛点问题,预计2018年第四季度上市。
红外热像技术,最早使用于军事领域,后转入民用,以热像仪最为普遍,主要用于工业检测、设备维护、防火、夜视以及安防等领域。随着AR技术以及产品的逐年成熟,AR与红外热像的集成,切实解放了双手,为使用者提供了更多元化的操控方式,成为一个迭代性应用,开始被国内热像领域关注。Leapsy率先推出工业定制款热成像AR头显,正是瞄准这一细分领域,成为国内首创,并已获发明专利。

Leapsy研发设计的国内首款工业定制热成像AR头显
热灵敏度、红外分辨率以及视场角是红外热像设备的三大关键指标。Leapsy自主研发的这款热成像AR头显内置单目红外镜头,通过软件算法实现对热源温度的检测,将具有不同温度区分的热像结果显示于AR头显上,热灵敏度小于0.05℃@30℃,探测器分辨率为384╳288。Leaspy热成像AR头显采用自由曲面方案,视场角(FOV)达60°,而市面上一般的AR头显,多为45°,广阔的视场角有效提升了使用者的可视范围以及安全性。考虑用途的特殊性,这款AR头显在外形设计上,与安全帽相结合,保护使用者在工业场景下的安全。从呈现效果来看,热成像AR头显的三维呈现效果能更加直观、清晰、准确、详细的在近眼距离查看温度检测结果,了解温度等指标,并将数据收集,远程传送。此外,人体工学设计以及舒适的材质选择,令这款头显在佩戴时十分舒适,适用于长期作业的使用场景。
Leaspy热成像AR头显从光学技术、产品结构、系统整合、外观设计到量产,全流程由Leapsy完整提供,在成本控制方面具有明显优势。目前,Leapsy已与中国红外热像领域三大品牌之一签订了长期合作,预计量产万台,将从电力设备检修应用切入。“今年,国家大力支持电力行业发展智能可穿戴单兵设备,AR热成像头显的研发以及与电力场景的结合,是我们与传统行业的一次创新尝试。这款产品预计2018年第四季度正式上市。在此基础上,随着市场的逐渐成熟,未来Leapsy计划拓展防火预警及安防等领域。” Leapsy 创始人兼CEO王博文介绍。
Leapsy热成像AR头显效果实拍图
Leapsy公司于2015年成立,拥有自主研发的光学模组及AR整机设计及量产能力,已申请多项发明专利,团队在产品设计、生产、供应链、光学研发等领域均有丰富的实践经验。Leapsy目前在电力、建筑、旅游、教育等领域均有应用。
6 月 24 日晚,在钉钉 2018 “新工作方式”超级发布会上,连同钉钉新校招、新商业套件等一系列升级软件,…
随着人脸识别的广泛运用,传统的指纹打卡、门禁卡等打卡机受到了强烈冲击,更加智能化的人脸识别考勤机受到了许多企业青睐。近日,在钉钉超级发布会上,钉钉智联联合魔点科技,就发布了一款魔点D2智能人脸识别考勤门禁机。

